 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChipMATE: Multi-Agent Training via Reinforcement Learning for Enhanced RTL Generation
May 13, 2026Existing API-based agentic systems for RTL code generation are fundamentally misaligned with industrial practice: they assume a golden testbench is available at generation time, rely on closed-source APIs incompatible with chip vendors' air-gapped security requirements, and cannot be trained on vendors' proprietary RTL codebases, leaving valuable internal data unused. Recent self-trained models address the deployment constraint but remain single-turn generators that overlook the critical role of verification in real industrial flows. To bridge these gaps, we present ChipMATE, the first self-trained multi-agent framework for RTL generation. Inspired by industrial practice where correctness emerges from cross-comparison between independently written RTL modules and reference models, ChipMATE pairs a Verilog agent with a Python reference-model agent that mutually verify each other's outputs without any golden oracle. We design a backtrack-based inference workflow to prevent error propagation across turns, and a two-stage training pipeline that first trains each agent individually to saturate its code-generation capability, then trains the team jointly to collaborate effectively. To support the training, we further build a hybrid data-generation framework that produces 64.4K high-quality reference model training samples. ChipMATE achieves 75.0\% and 80.1\% pass@1 on VerilogEval V2 with 4B and 9B base models, outperforming all existing self-trained models and even DeepSeek V4 with 1600B parameters. Our code and model weights are publicly available in https://github.com/zhongkaiyu/ChipMATE.
JigsawRL: Assembling RL Pipelines for Efficient LLM Post-Training
Apr 26, 2026We present JigsawRL, a cost-efficient framework that explores Pipeline Multiplexing as a new dimension of RL parallelism. JigsawRL decomposes each pipeline into a Sub-Stage Graph that exposes the intra-stage and inter-worker imbalance hidden by stage-level systems. On this abstraction, JigsawRL resolves multiplexing interference through dynamic resource allocation, eliminates fragmented utilization by migrating long-tail rollouts across workers, and formulates their coordination as a graph scheduling problem solved with a look-ahead heuristic. On 4-64 H100/A100 GPUs across different agentic RL pipelines and models, JigsawRL achieves up to 1.85x throughput over Verl on synchronous RL, 1.54x over StreamRL and AReaL on asynchronous RL, and supports heterogeneous pipelines with moderate latency trade-off.
ScaleSim: Serving Large-Scale Multi-Agent Simulation with Invocation Distance-Based Memory Management
Jan 29, 2026LLM-based multi-agent simulations are increasingly adopted across application domains, but remain difficult to scale due to GPU memory pressure. Each agent maintains private GPU-resident states, including models, prefix caches, and adapters, which quickly exhaust device memory as the agent count grows. We identify two key properties of these workloads: sparse agent activation and an estimable agent invocation order. Based on an analysis of representative workload classes, we introduce invocation distance, a unified abstraction that estimates the relative order in which agents will issue future LLM requests. Leveraging this abstraction, we present ScaleSim, a memory-efficient LLM serving system for large-scale multi-agent simulations. ScaleSim enables proactive prefetching and priority-based eviction, supports diverse agent-specific memory through a modular interface, and achieves up to 1.74x speedup over SGLang on simulation benchmarks.
ChipBench: A Next-Step Benchmark for Evaluating LLM Performance in AI-Aided Chip Design
Jan 29, 2026While Large Language Models (LLMs) show significant potential in hardware engineering, current benchmarks suffer from saturation and limited task diversity, failing to reflect LLMs' performance in real industrial workflows. To address this gap, we propose a comprehensive benchmark for AI-aided chip design that rigorously evaluates LLMs across three critical tasks: Verilog generation, debugging, and reference model generation. Our benchmark features 44 realistic modules with complex hierarchical structures, 89 systematic debugging cases, and 132 reference model samples across Python, SystemC, and CXXRTL. Evaluation results reveal substantial performance gaps, with state-of-the-art Claude-4.5-opus achieving only 30.74\% on Verilog generation and 13.33\% on Python reference model generation, demonstrating significant challenges compared to existing saturated benchmarks where SOTA models achieve over 95\% pass rates. Additionally, to help enhance LLM reference model generation, we provide an automated toolbox for high-quality training data generation, facilitating future research in this underexplored domain. Our code is available at https://github.com/zhongkaiyu/ChipBench.git.
Rethinking Video Generation Model for the Embodied World
Jan 21, 2026Video generation models have significantly advanced embodied intelligence, unlocking new possibilities for generating diverse robot data that capture perception, reasoning, and action in the physical world. However, synthesizing high-quality videos that accurately reflect real-world robotic interactions remains challenging, and the lack of a standardized benchmark limits fair comparisons and progress. To address this gap, we introduce a comprehensive robotics benchmark, RBench, designed to evaluate robot-oriented video generation across five task domains and four distinct embodiments. It assesses both task-level correctness and visual fidelity through reproducible sub-metrics, including structural consistency, physical plausibility, and action completeness. Evaluation of 25 representative models highlights significant deficiencies in generating physically realistic robot behaviors. Furthermore, the benchmark achieves a Spearman correlation coefficient of 0.96 with human evaluations, validating its effectiveness. While RBench provides the necessary lens to identify these deficiencies, achieving physical realism requires moving beyond evaluation to address the critical shortage of high-quality training data. Driven by these insights, we introduce a refined four-stage data pipeline, resulting in RoVid-X, the largest open-source robotic dataset for video generation with 4 million annotated video clips, covering thousands of tasks and enriched with comprehensive physical property annotations. Collectively, this synergistic ecosystem of evaluation and data establishes a robust foundation for rigorous assessment and scalable training of video models, accelerating the evolution of embodied AI toward general intelligence.
Yggdrasil: Bridging Dynamic Speculation and Static Runtime for Latency-Optimal Tree-Based LLM Decoding
Dec 29, 2025Speculative decoding improves LLM inference by generating and verifying multiple tokens in parallel, but existing systems suffer from suboptimal performance due to a mismatch between dynamic speculation and static runtime assumptions. We present Yggdrasil, a co-designed system that enables latency-optimal speculative decoding through context-aware tree drafting and compiler-friendly execution. Yggdrasil introduces an equal-growth tree structure for static graph compatibility, a latency-aware optimization objective for draft selection, and stage-based scheduling to reduce overhead. Yggdrasil supports unmodified LLMs and achieves up to $3.98\times$ speedup over state-of-the-art baselines across multiple hardware setups.
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025



Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
SoFar: Language-Grounded Orientation Bridges Spatial Reasoning and Object Manipulation
Feb 18, 2025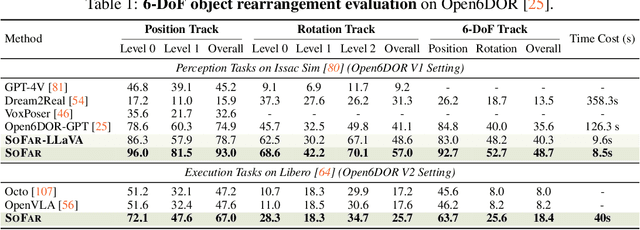

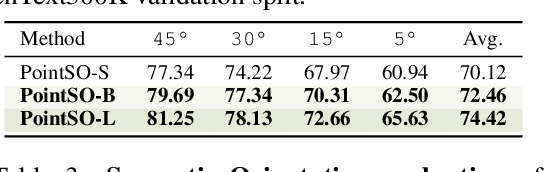
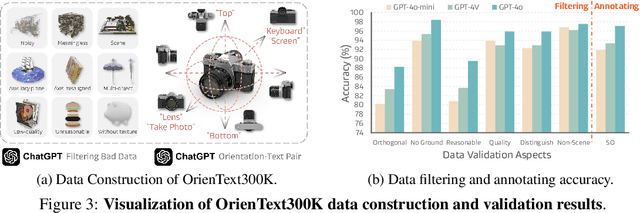
Spatial intelligence is a critical component of embodied AI, promoting robots to understand and interact with their environments. While recent advances have enhanced the ability of VLMs to perceive object locations and positional relationships, they still lack the capability to precisely understand object orientations-a key requirement for tasks involving fine-grained manipulations. Addressing this limitation not only requires geometric reasoning but also an expressive and intuitive way to represent orientation. In this context, we propose that natural language offers a more flexible representation space than canonical frames, making it particularly suitable for instruction-following robotic systems. In this paper, we introduce the concept of semantic orientation, which defines object orientations using natural language in a reference-frame-free manner (e.g., the ''plug-in'' direction of a USB or the ''handle'' direction of a knife). To support this, we construct OrienText300K, a large-scale dataset of 3D models annotated with semantic orientations that link geometric understanding to functional semantics. By integrating semantic orientation into a VLM system, we enable robots to generate manipulation actions with both positional and orientational constraints. Extensive experiments in simulation and real world demonstrate that our approach significantly enhances robotic manipulation capabilities, e.g., 48.7% accuracy on Open6DOR and 74.9% accuracy on SIMPLER.
DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes
Oct 30, 2024



Grasping in cluttered scenes remains highly challenging for dexterous hands due to the scarcity of data. To address this problem, we present a large-scale synthetic benchmark, encompassing 1319 objects, 8270 scenes, and 427 million grasps. Beyond benchmarking, we also propose a novel two-stage grasping method that learns efficiently from data by using a diffusion model that conditions on local geometry. Our proposed generative method outperforms all baselines in simulation experiments. Furthermore, with the aid of test-time-depth restoration, our method demonstrates zero-shot sim-to-real transfer, attaining 90.7% real-world dexterous grasping success rate in cluttered scenes.
A Geometrical Approach to Evaluate the Adversarial Robustness of Deep Neural Networks
Oct 10, 2023



Deep Neural Networks (DNNs) are widely used for computer vision tasks. However, it has been shown that deep models are vulnerable to adversarial attacks, i.e., their performances drop when imperceptible perturbations are made to the original inputs, which may further degrade the following visual tasks or introduce new problems such as data and privacy security. Hence, metrics for evaluating the robustness of deep models against adversarial attacks are desired. However, previous metrics are mainly proposed for evaluating the adversarial robustness of shallow networks on the small-scale datasets. Although the Cross Lipschitz Extreme Value for nEtwork Robustness (CLEVER) metric has been proposed for large-scale datasets (e.g., the ImageNet dataset), it is computationally expensive and its performance relies on a tractable number of samples. In this paper, we propose the Adversarial Converging Time Score (ACTS), an attack-dependent metric that quantifies the adversarial robustness of a DNN on a specific input. Our key observation is that local neighborhoods on a DNN's output surface would have different shapes given different inputs. Hence, given different inputs, it requires different time for converging to an adversarial sample. Based on this geometry meaning, ACTS measures the converging time as an adversarial robustness metric. We validate the effectiveness and generalization of the proposed ACTS metric against different adversarial attacks on the large-scale ImageNet dataset using state-of-the-art deep networks. Extensive experiments show that our ACTS metric is an efficient and effective adversarial metric over the previous CLEVER metric.